* * * * * Willkommen bei RolandPudimat.de! * * * * *
Keine Werbung!
Keine Cookies!
Du bist der Besucher seit dem 22.09.2009.
ED 20220121; UP 20220121; AU Pudimat, R.
KT Pendel; Magnet; Solarpendel; Mikrorechner; PIC
Solarpendel
Ich liebe Dinge, die mit geringem Aufwand ewig laufen. So habe ich ein Pendel [1] nachgebaut.
Guido Ottaviani (IT) hat Alt mit Neu verbunden: ein Pendel nach Galileo Galilei angetrieben mit einem Mikrorechner.
Sein stabförmiges Pendel ist in einem Schneidenlager aufgehängt.
Aus [2] habe ich von Berto Aussems (NL) gelernt, wie man Reibungsverluste minimiert und die Energie der Sonne nutzt.
Um zu verstehen, wie ein magnetisches Pendel funktioniert, braucht man etwas Physik aus der Schule.
Hilfreich ist auch ein Blick auf die Beschreibung eines physikalischen Pendels:
[Wiki, Physikalisches Pendel]
Induktionsgesetz:
(Faraday, 1791-1867)
In einer Spule wird eine Spannung induziert, solange sich das von der Spule umfasste Magnetfeld ändert.
Die Induktionsspannung Uind ist umso größer,
- je schneller sich der räumliche Anteil des von der Spule umfassten Magnetfeldes ändert,
- je größer die Windungsanzahl N der Spule ist,
- je größer der Querschnitt A0 der Spule ist,
- wenn die Spule einen Eisenkern besitzt.
Lenzsches Gesetz:
(Lenz, 1804-1865)
Der Induktionsstrom I ist stets so gerichtet,
dass er seiner Ursache seiner Entstehung entgegenwirkt.
Die nachstehende Beschreibung passt auf die von mir gewählte Schaltung, die hier als .pdf zur Verfügung steht (ca. 140kB):
[Solarpendel.pdf]
Bei einer nicht bewegten Spule L1 ist die wirksame Fläche A = A0 * N konstant (A0 = Fläche einer Windung, N= Windungszahl).
Beim Vorbeischwingen eines Magneten an der Spule L1 ist die sich ändernde magnetische Flußdichte (dB/dt)
die Ursache für das Auftreten einer Induktionsspannung Uind = A (dB/dt).
Wenn das Pendel mit dem Magneten über die Spule L1 bewegt wird,
wird durch die Induktionsspannung verzögert ein Magnetfeld in der Spule L1 aufgebaut (Selbstinduktion).
Die Pendelgeschwindigkeit und damit die Änderungsgeschwindigkeit der Flußdichte (dB/dt) ist am tiefsten Punkt des Pendels am größten.
Am tiefsten Punkt des Pendels erreicht die Induktionsspannung ein Maximum.
Wenn der Magnet die Spule L1 verlässt,
dann dann ändert sich die magnetische Flußdichte in der Spule L1 nicht mehr- die Induktionsspannung ist wieder null.
Die magnetische Feldenergie der Spule L1 wird wieder abgebaut- kann eine LED kurz zum Leuchten bringen.
Nach dem Lenzschen Gesetz kehrt sich die Stromrichtung I um, so dass die Induktionsspannung ins Negative schwingt.
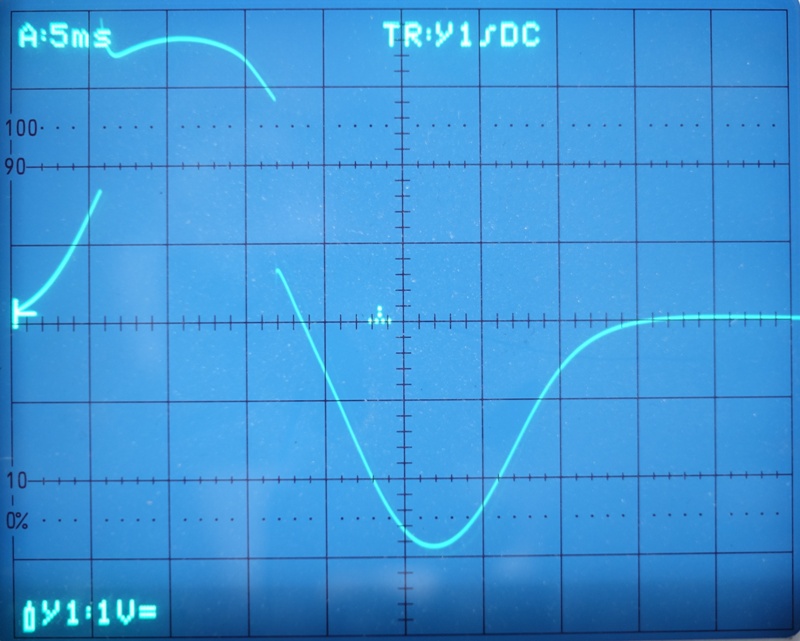
Siehe auch Oszillogramm der Induktionsspannung Uind = L (dI/dt) an der Spule L1 (TP1).
Ohne Hilfsenergie würde das Pendel wegen der Reibverluste aufhören, zu pendeln.
Die etwas abgewandelte Schaltung nach [1] bewirkt, dass das Pendel jeweils im tiefsten Punkt einen mechanischen Puls erhält,
so dass die Pendelschwingung aufrecht erhalten wird.
Wenn nach einem einmaligen Anstoßen des Pendels die Induktionsspannung an der Spule L1 groß genug ist,
ergibt sich am Pin 4/GP1 eines PIC10F222 eine Signaländerung, so dass der PIC aus dem Schlafmodus kommt.
Die mit while(1) definierte Programmroutine wird abgearbeitet.
Nach einer Verzögerung von 1 ms wird der Ausgang am Pin 3/GP2 für 10 ms auf High geschalten,
so dass T1 und T2 leitend werden. Der 10 ms währende Strom durch die Spule L1 erzeugt ein Magnetfeld,
dass mit dem Magnetfeld des Permanentmagneten wechselwirkt.
Ungleiche Pole stoßen sich ab- das Pendel erhält einen mechanischen Puls.
Nach Ausgabe des Strompulses durch L1 geht der PIC wieder in den stromsparenden Schlafzustand.
Zur Spannungsversorgung dient eine Reihenschaltung aus 3 AA-Batterien.
Die Batterien werden mittels einer Solarzelle gepuffert. Liefert die Solarzelle mehr als 4,6 V,
schaltet zum Schutz vor Überladen der Batterien die Z-Diode D2 durch. Die Solarzelle liefert max. 0,6 W,
so dass die max. Verlustleistung (1,3 W) der Z-Diode D2 nie überschritten wird.
Ein Spannungsregler MCP1700 mit sehr geringem Spannungsabfall (engl. Low Dropout (LDO) Voltage)
über dem integrierten CMOS-Stellglied erzeugt aus der 3,6 V Batteriespannung 2,5 V Versorgungsspannung VDD für den PIC.
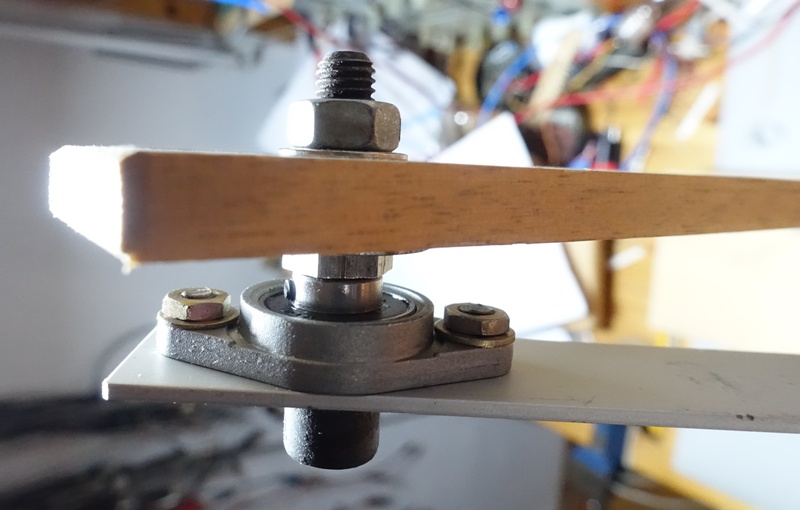
Das Pendel ist in einem leichtgängigen Flanschkugellager aufgehängt.
Alle mechanischen Teile bestehen aus nicht ferromagnetischem Material:
Holz, Alu, Messing. Ferromagnetisches Material (z.B. die Hülle einer AA-Batterie)
in der Nähe der Pendelbahn würde die Pendelbewegung negativ beeinflussen.
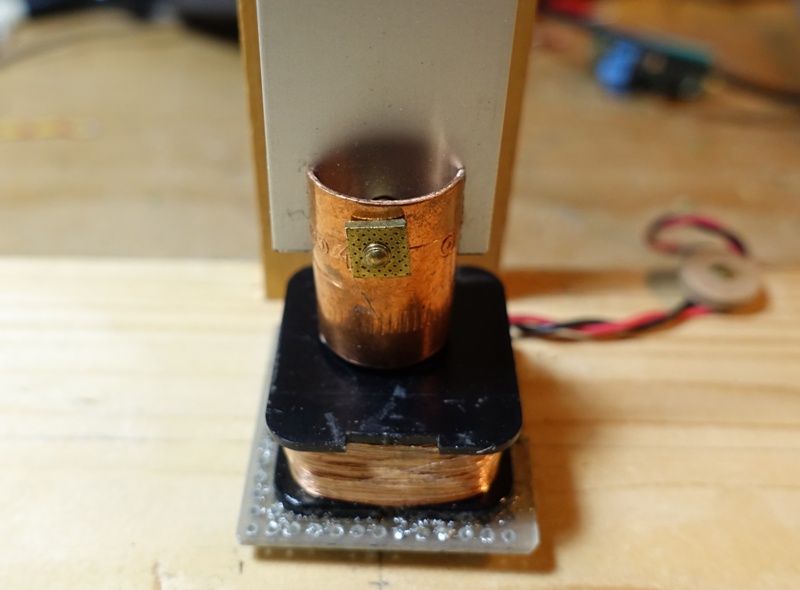
Der Scheibenmagnet ist am Ende einer Kupfermuffe eingeklebt. Der Abstand zwischen Magnet und Spule L1 beträgt weniger als 1 mm.
Mit der gewählten Pendellänge ca. 45 cm ergeben sich ca. 50 Schwingungen pro Minute.
Je nach verwendeten Magneten und Spule kann die Verzögerung und die Einschaltdauer der Transistoren T1, T2 variieren.
Hier zeigt sich der Vorteil eines PIC: Programmänderung und Neubrennen- kein Löten.
PIN4/GP1 ist hier als Digitaleingang konfiguriert. Denkbar wäre eine Lösung mit einem PIC und Verwenden eines analogen Eingangs.
Ein Speicheroszi kann bei der Inbetriebnahme hilfreich sein.
Quellen für Spule: Selbst wickeln auf Nähmaschinenspule o.ä. [3] (#28 magnetic wire, 9 Ohm), alte Relais, Motoren, Festplatten.
[1] am 20.01.2022 hier:
[Ottaviani, Pendulum]
[2] am 20.01.2022 hier und auf ut:
[ Aussems, Pendel],
[Aussems, Pendelvideo]
[3] Gasparovic Tony, Magnetic Pendulum, NUTS&VOLTS, Sep. 2009, S. 36-38
* * *
Spannung an TP1:
* * *
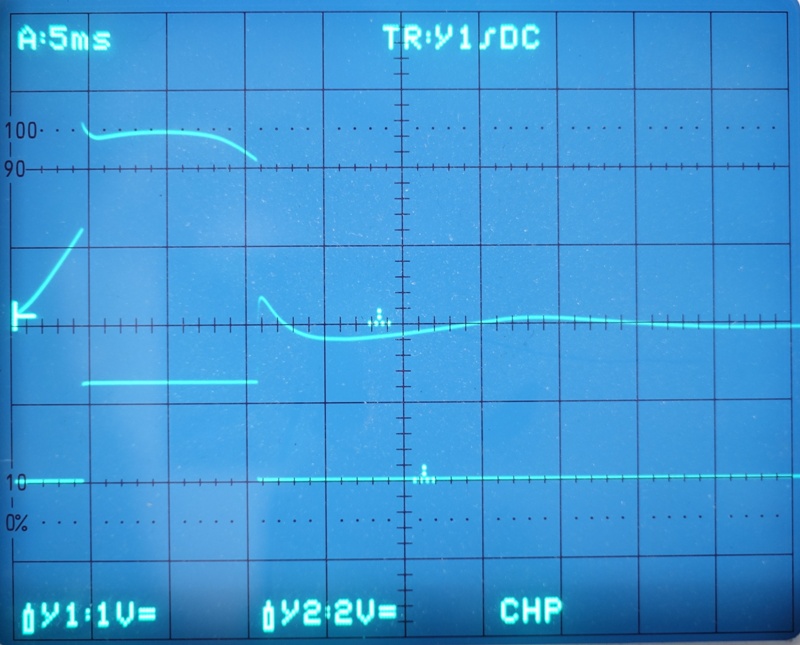
Spannung an TP2 (oben) und TP3 (unten):
* * *
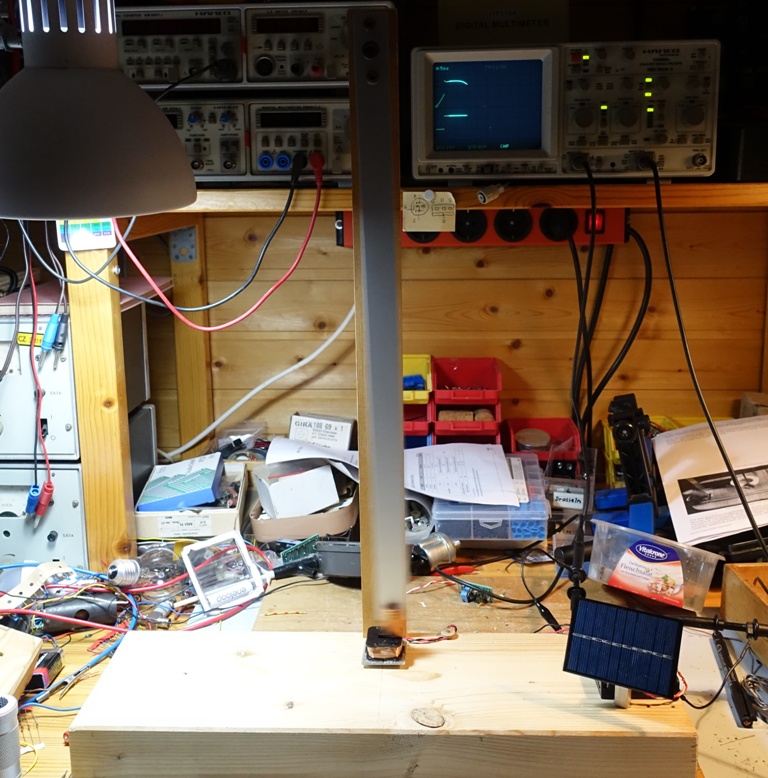
Pendel auf dem Basteltisch:
* * *
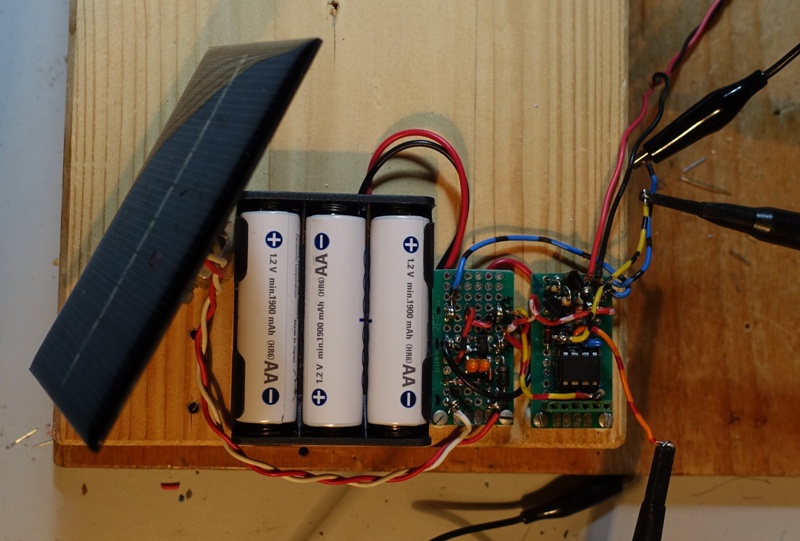
Pendel Elektrik:
* * *
Pendel Spule und Magnet (in Lötmuffe):
* * *
Pendel Flanschlager:
* * *
Hier noch das Pendel in Aktion:
* * *