* * * * * Willkommen bei RolandPudimat.de! * * * * *
Keine Werbung!
Keine Cookies!
Du bist der . Besucher seit dem 22.09.2009.
Winkekatze
In DE gibt es eine Vielzahl von asiatischen Restaurants und Geschäften. In einem Schaufenster eines chinesischen Geschäftes bei mir um die Ecke sind mehrere Winkekatzen aufgestellt, die munter vor sich hinwinken. Obwohl ich dort nichts kaufen wollte, blieb ich eine Weile vor dem Schaufenster stehen. Ich war auf auf einen Marketingtrick des Geschäftsinhabers reingefallen. Eigentlich glaubte ich, als aufgeklärter Käufer gegen Werbung immun zu sein… Blickfang, Hingucker oder Eyecatcher gehören heute genauso wie Duft oder Musik zu den Methoden, um Waren oder Dienstleistungen an den Mann zu bringen.
Das mit den Winkekatzen lies mir kein Ruhe. Ich wollte unbedingt wissen, welcher Aufwand dahinter steckt und was die Katze winken lässt. So kaufte ich für weniger als 10 EUR eine Katze- nicht beim Händler um die Ecke, sondern im Netz ;-)
* * *
* * *
Den Chinesen wurde gern vorgeworfen, sie würden alles gnadenlos nachbauen. Das hat sich geändert- heute können deutsche Ingenieure von den Chinesen lernen, wie man es besser, schneller und kostengünstiger macht. Hier das Ergebnis meines Reverse Engineering der Katze:
Die äußere Hülle der Katze besteht aus einer Keramik, die aufwendig coloriert ist.
Auf dem Bauch der Katze steht geschrieben (danke Markus):
"10.000, (also ganz viele), Ryo (Geldstücke) für ein glückliches Dasein hereinlassen."
Auf dem Arm steht:
"Das Glück (Vermögen, Ehrengäste) einladen."
Die Baugruppe mit dem Armantrieb war mit der Hülle verklebt- eine erste Hürde gegen Reverse Engineering.
Um den Armantrieb aus der Hülle entnehmen zu können,
habe ich die Verklebung mit einem Messer gelöst und den Winkearm seitlich aus einer Aufnahmebuchse gezogen.
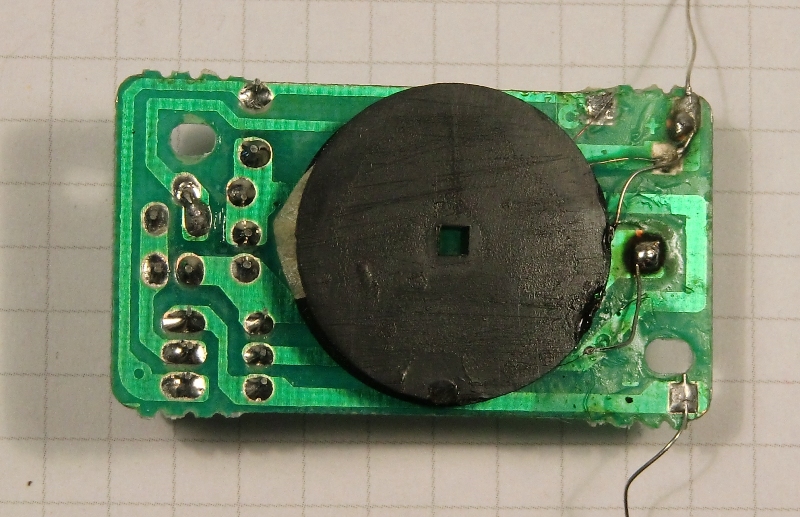
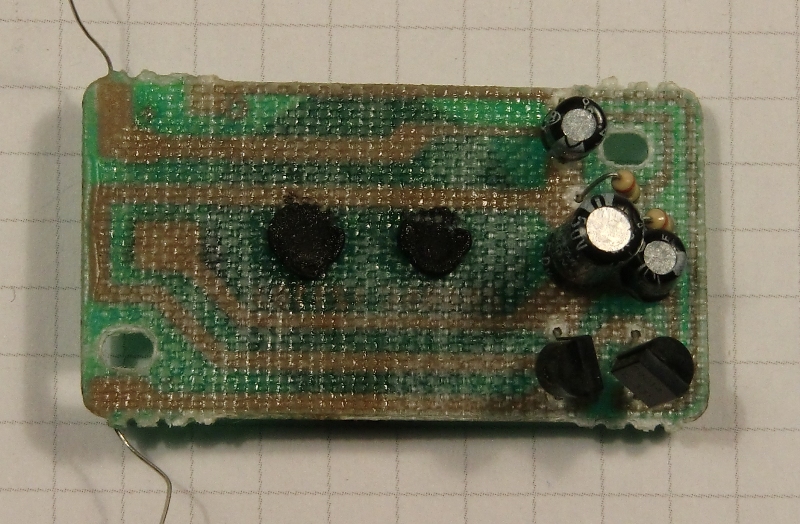
Das Innenleben der Katze seht ihr hier:
* * *

* * *
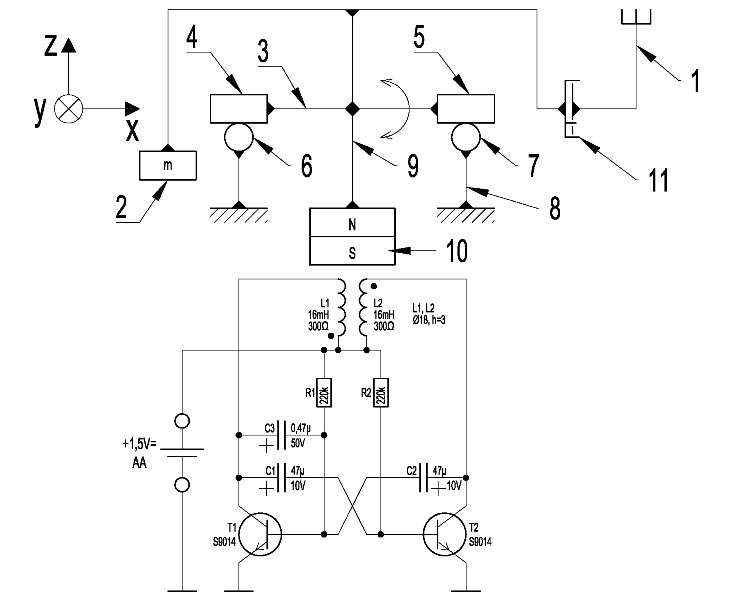
Der nach oben weisender Winkearm 1 und ein nach unten weisendes Gegengewicht 2 sind an einem horizontal gelagerten Balken 3 befestigt. An den Balkenenden befinden sich zylindrische Nadeln 4, 5 mit koaxialen Achsen. Die Nadeln 4, 5 liegen punktförmig auf horizontal in der x-y-Ebene angeordneten zylindrischen Stäben 6, 7. Die Achsen der Stäbe 6, 7 liegen in Richtung y senkrecht zur gemeinsamen Achse x der Nadeln 4, 5. Die Stäbe 6, 7 sind gestellfest an einem Lagerbock 8 angeordnet. Die Nadeln 4, 5 bzw. der Balken 3 sind durch Anschläge gegen Verschieben und Verdrehen in der x-y-Ebene gesichert. Mittig am Balken 3 ist an einer nach unten weisenden Strebe 9 ein Ringmagnet 10 befestigt. Der Arm 1 ist verdrehsicher in einer Buchse 11 gehalten.
Der Rollwiderstand zwischen den Nadeln 4, 5 und den Stäben 6, 7 ist gering. Der Balken 3 mit dem Arm 1, dem Gegengewicht 2, der Strebe 9 und dem Magnet 10 bilden ein Pendel. Der hohle Arm 1 besteht aus einem leichten Kunststoff. Er wiegt nur 7 g. Der Schwerpunkt des Pendels liegt unterhalb der Achse x der Nadeln 4, 5. Der Magnet 10 schwingt periodisch an zwei koaxial angeordneten Spulen L1, L2 vorbei. Ohne Batterie, d.h. ohne Magnetkräfte der Spulen L1, L2, beträgt die Eigenfrequenz des Pendels 88 pro min. Im Normalbetrieb mit Batterie schwingt der Arm 96 mal je min.
Die auf einen gemeinsamen Körper gewickelten Spulen L1, L2 sind mit einer Schaltung verbunden, die über Magnetkopplung bei jedem Vorbeilauf des Magneten 10 zum Ausgleich von lagerbedingten Reibverlusten dem Pendel einen mechanischen Impuls mitgeben. Die Energie zum Aufrechterhalten der Pendelschwingung ist so gering, dass zur Spannungsversorgung der Schaltung eine einzige AA-Batterie ausreicht, um die Katze mehrere Monate winken zu lassen. Der Winkearm pendelt mit ca. 1,5 Hz.
* * *
* * *
* * *
* * *
Die Schaltung besteht aus nur wenigen Bauelementen.
Auf dem ersten Blick sieht das aus, wie eine Kippschaltung.
Wie die Schaltung funktioniert, habe ich noch nicht gänzlich herausgefunden.
Hier wäre ein Speicheroszi hilfreich. Insoweit bin ich für Hinweise dankbar.
25.01.2021: Aktualisierung
- Karl, DJ5IL, hat die Schaltung mit LTspice simuliert.
Er kommt zu dem Schluss, dass es sich um kreuzgekoppelte Transistoren handelt.
Das in den Spulen erzeugte Magnetfeld unterstützt die Pendelbewegung des Magneten,
indem es ihn kurzzeitig anzieht wenn er sich nähert und wegdrückt wenn er sich entfernt.
- Walter hat die Schaltung analysiert und erkennt eine astabile Kippschaltung/ einen Multivibrator,
wie sie z.B. hier beschrieben ist:
https://www.grund-wissen.de/elektronik/schaltungen/kippschaltungen.html#fig-kippschaltung-astabil
Wenn der Winkearm ausgelenkt und fixiert ist, also nicht über den Spulen steht,
dann zeigt ein Oszillogramm am Kollektor von T1 oder T2 ein periodisches Signal.
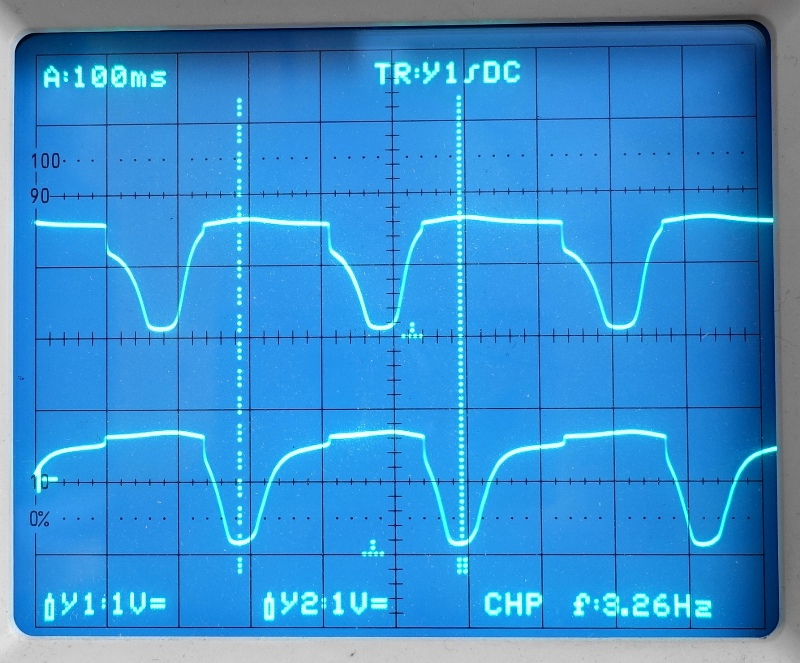
Die Transistoren werden wechselseitig kurz mit f1 = 0,3 Hz durchgeschalten (Foto 6s; F5,6):
* * *
* * *
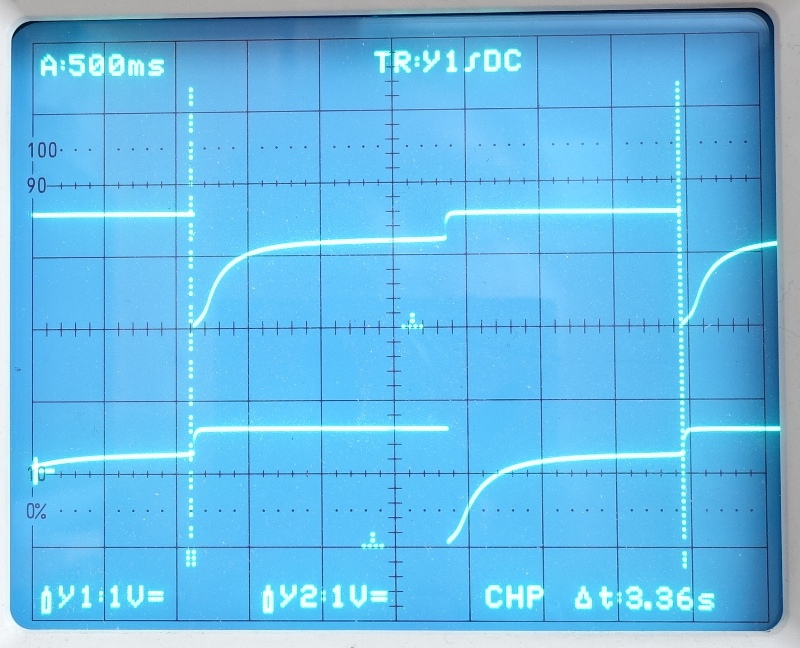
Im Normalbetrieb zeigt sich an den Kollektoren von T1, T2 eine Kippfrequenz von ca. 3 Hz (Foto 1,3s; F3,2):
* * *
* * *
Hier noch der Armantrieb in Aktion:
* * *